Research publication · Handheld augmented-reality terahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More sensing
Augmented Reality TerahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More (AR-THz) Sensing and Imaging with Frequency-Modulated Continuous-Wave Radar
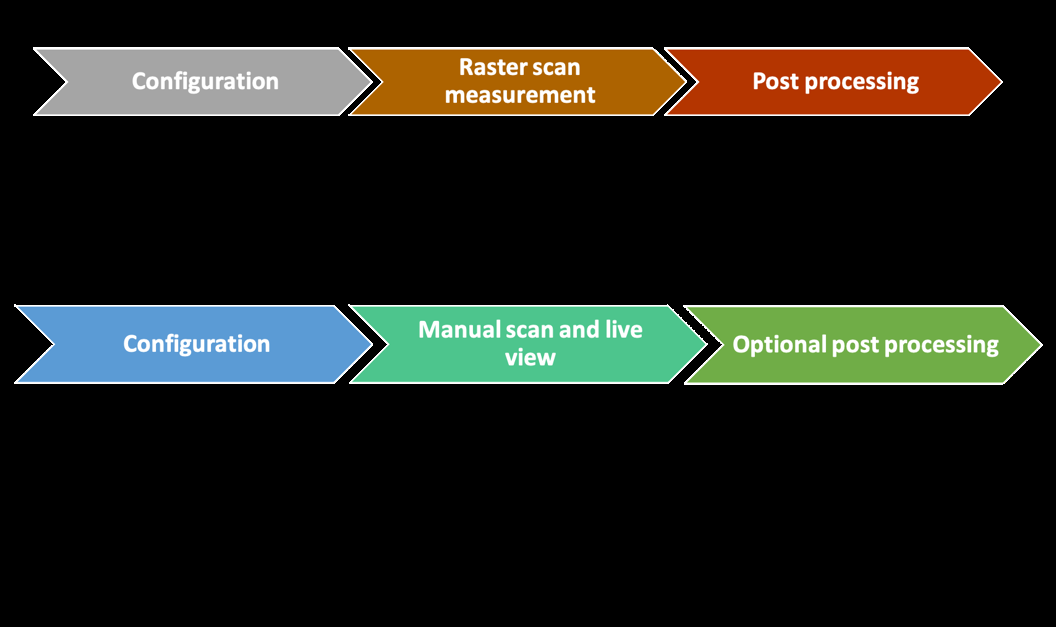
Most terahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More images are assembled on a grid. A motorized stage or robot moves the sensor through known coordinates, and processing later assigns each measurement to a pixel. That architecture provides repeatable positioning, but it adds weight, restricts the inspected geometry and separates data collection from interpretation. This study asks whether a lower-resolution measurement can become more useful in the field by giving the operator immediate spatial feedback. Its AR-THz platform combines a compact frequency-modulated continuous-wave radar with smartphone tracking and overlays processed terahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More values on the live view of the inspected object.
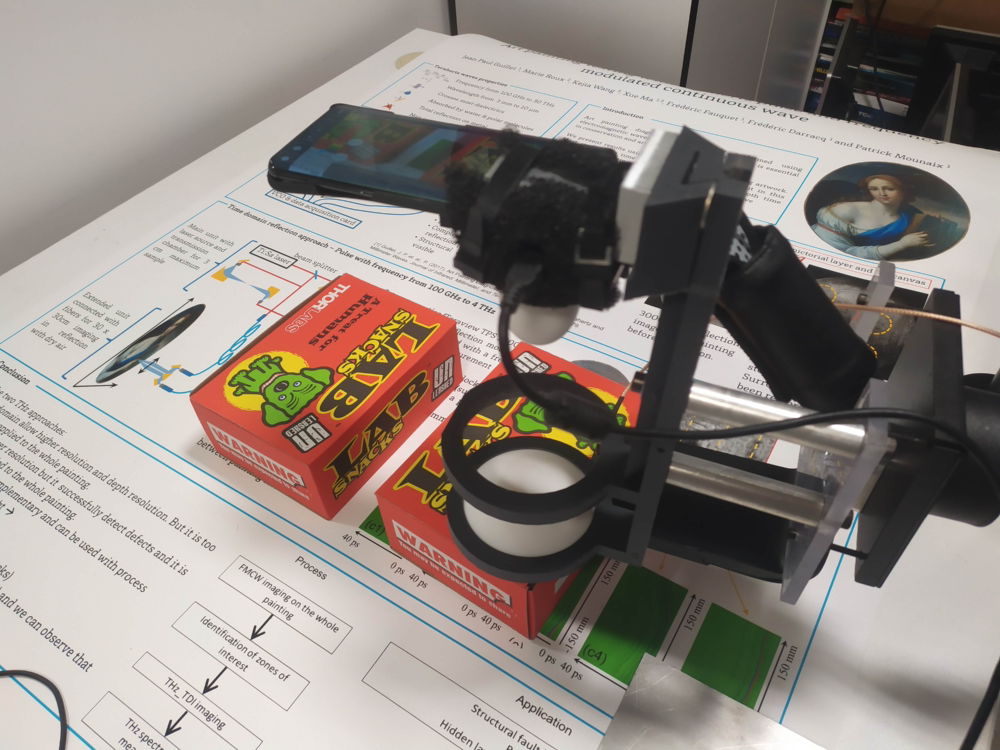
The system is intended for rapid detection and coarse mapping rather than precision metrology. The probe is moved by hand, and the operator sees color-coded measurements accumulate over the visible scene. Two demonstrations establish the principle: locating a metal plate hidden beneath a painted surface and distinguishing a filled box from an empty one through their depth echoes. Both cases use deliberately simple signal processing. Their value lies in showing how radar ranging, optical tracking and an augmented-reality interface can form one interactive measurement loop without a conventional raster stage.
Featured visual: Image 1 from the Airtable record associated with this publication. Consult the original paper for the authoritative figure caption and interpretation. Source publication.
Visuals are drawn from the Airtable research archive. Figure numbering, rights and interpretation should be checked against the original publication before republication outside this site.
A portable radar linked to the visible scene
The FMCW transceiver uses a silicon-germanium implementation and a dielectric lens antenna. Replacing a metal horn lowers component cost and supports a more compact assembly, although the dielectric lens introduces stronger internal reflections and sidelobes. A 45 GHz sweep bandwidth provides a longitudinal resolution of approximately 3.3 mm, allowing some of those internal reflections to be separated in depth and removed during processing. The intended applications do not demand a lateral resolution better than about 5 mm. A comparatively large depth of field is more useful because the probe-to-object distance changes during manual scanning.
The smartphone camera observes the workspace while its tracking software estimates motion and maintains a spatial model of the scene. A calibration relates the terahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More measurement point to coordinates in the camera view. As the user moves, each radar value is assigned to the corresponding physical location and rendered as a color overlay. Registration is therefore essential: a correct radar detection placed at the wrong visual coordinate would give a misleading image. The reported implementation is designed around a manual positioning accuracy of approximately 5 mm, and the display resolution is adjusted to that scale.
Each FMCW sweep is transformed from frequency into a depth profile. The software does not attempt a full material inversion. Instead, it extracts a feature chosen for the inspection question, sends the resulting scalar value to the phone and updates the overlay. This keeps computation light enough for immediate feedback and lets the operator revisit an uncertain area while still viewing the target. It also means that a new object class may require a new feature-extraction rule rather than using the same color scale unchanged.
Hidden metal and sealed-box demonstrations
In the heritage-oriented example, a metal plate is positioned 5 mm below the painted surface, behind the mouth of a figure. The metallic return is stronger than the surrounding response, so the algorithm retains the maximum peak amplitude from each measurement. A manual scan lasting less than one minute collects points around the region and produces a red zone over the hidden plate. The demonstration shows rapid localization of a deliberately introduced high-reflectivity target. It does not identify the metal composition, date an intervention or establish that every subsurface feature in a real painting would generate comparable contrast.
The packaging example relies on depth rather than peak strength alone. In an empty cardboard box, the radar receives one echo from the front wall and another from the rear wall after propagation through the cavity. Confectionery inside an otherwise identical box absorbs and scatters the wave, reducing or removing the second echo. Processing first locates the front interface, then examines a 1 cm interval approximately 6 cm deeper and reports its maximum amplitude. The augmented display marks the empty box with the color assigned to a strong rear-wall return and the filled box with the color assigned to attenuation. Opening the boxes confirms the qualitative classification in this two-sample test.
These examples are intentionally easy to interpret. A metal plate creates a large reflectivity contrast, and an empty air cavity differs strongly from a box full of absorbing objects. Real inspections may involve curved surfaces, mixed materials, variable wall thickness, moisture and weaker defects. The handheld path is also irregular, so spatial sampling density depends on user behavior. The paper acknowledges that the resulting view sits between a point detector and a high-resolution raster image: it gains agility and contextual visualization while accepting lower spatial fidelity.
Human-guided sensing as a research direction
The AR interface changes the role of the operator. Instead of completing a scan and waiting for a separate image, the user can respond to the measurement, slow down near a contrast and check neighbouring positions. That interaction could be valuable in museums, maintenance settings or packaging trials where a specialist already knows which areas deserve attention. It also creates validation needs that conventional fixed stages avoid, including tracking drift, calibration stability, repeatability between users and the risk that a persuasive color overlay obscures uncertainty in the underlying signal.
Further work could compare the handheld system with reference scans, quantify localization error on non-planar objects and test more diverse material combinations. More advanced denoising, synthetic-aperture processing or sensor fusion may improve the images, but additional computation should preserve the immediate response that motivates the platform. The collaboration behind the study connects terahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More radar design with mobile augmented-reality development and application testing. Within its demonstrated scope, AR-THz is a proof of concept for making sub-surface sensing visible in the same spatial frame as the object being examined, rather than a replacement for calibrated laboratory tomography.
Bibliographic reference
Recommended citation: Guillet, J.-P., Fauquet, F., & Rioult, J. (2024). Augmented Reality TerahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More (AR-THz) Sensing and Imaging with Frequency-Modulated Continuous-Wave Radar. Journal of Infrared, Millimeter, and TerahertzTerahertz radiation is electromagnetic energy commonly associated with frequencies around 0.1 to 10 THz, between microwaves and infrared, where many materials reveal distinctive propagation, absorption, and imaging behavior. More Waves, 45(5-6), 433-443. https://doi.org/10.1007/s10762-024-00984-z
Publisher: Springer Nature. Airtable record: recLd4jk3saUTrgFM.